·Q╣▄ĮM│╔
1Ż«┴óų∙Ż║
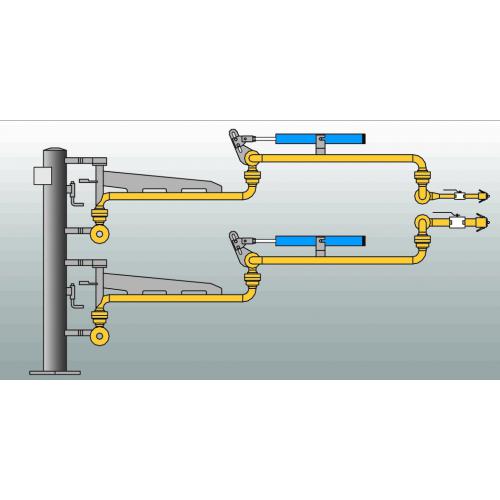
×ķ╩╣╣▄Ą└╩▄┴”║Ž└Ē╗»
Ż¼ė├ė┌ų¦│ą▒█Ą─ųž┴┐Ż¼Ęų╔óą²▐D(zhu©Żn)ĮėŅ^▌d║╔
Ż¼░▓čbĘĆ(w©¦n)╣╠
ĪŻ
┴óų∙┼cŚŻś“čb┼õĢr(sh©¬)┐╔ęį▓╔ė├┬▌╦©▀BĮė╗“║ĖĮė
ĪŻ
2Ż«ā╚(n©©i)▒█µiŠoŻ║
ė├ė┌į┌▒█į┌╩š╚▌╬╗ų├Ģr(sh©¬)
Ż¼īó▒█µiŠoį┌įō╬╗ų├Ż¼▀@śė┐╔ęįĘ└ų╣ę“?y©żn)ķ┤¾’L(f©źng)Łh(hu©ón)Š│╗“ę“ĘŪ▓┘ū„╚╦åT▓┘ū„Č°╩╣▒█╗“ų▄?ch©ź)·Į©ų■╩▄ōp
ĪŻ
3Ż«Įė┐┌Ż║╩Ū▒█┼c╣▄ŠĆ(xi©żn)Ą─▀BĮė▓┐Ęų
Ż¼ę╗░ŃĮė┐┌┼c╣▄ŠĆ(xi©żn)ų«ķg▓╔ė├Ę©╠m▀BĮėĪŻ
4Ż«ą²▐D(zhu©Żn)ĮėŅ^
ė├ė┌▒█Ą─ą²▐D(zhu©Żn)▀\(y©┤n)äė(d©░ng)
Ż¼ØM(m©Żn)ūŃš²│Ż╩╣ė├ĘČć·(░³Įj(lu©░)ĘČć·)Ż¼│ŻęÄ(gu©®)·Q╣▄▓╔ė├4ų╗╗“5ų╗ą²▐D(zhu©Żn)ĮėŅ^
Ż¼ęįīŹ(sh©¬)¼F(xi©żn)╚²ŠS▀\(y©┤n)äė(d©░ng)╝░Ę©╠mĮė┐┌Ą─ī”(du©¼)Įė
ĪŻ
5Ż«ā╚(n©©i)▒█Ż║
▀BĮėĮė┐┌┼c═Ō▒█ų«ķgĄ─▓┐ĘųŻ¼┐╔į┌╦«ŲĮ├µ╔Ž╗ž▐D(zhu©Żn)
ĪŻ
6Ż«═Ō▒█Ż║
×ķ·Q╣▄Ą─ų„¾w▓┐Ęų
Ż¼┐╔ęįīŹ(sh©¬)¼F(xi©żn)╦«ŲĮĘĮŽ“360°
Ż¼
┤╣ų▒ĘĮŽ“75°ĘČć·Ą─╗ž▐D(zhu©Żn)ĪŻ
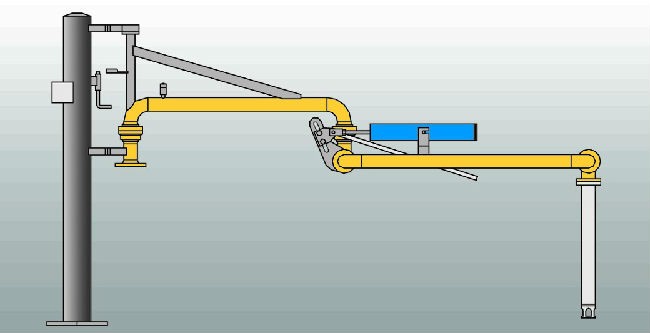
7Ż«ÜŌŽÓ╣▄Ż©AL1412/3ą═Ż®Ż║
▓╔ė├▓╗õPõōĮī┘▄ø╣▄
Ż¼ī¦(d©Żo)│÷ō]░l(f©Ī)Ą─ÜŌ¾wĮķ┘|(zh©¼)
ĪŻ
8Ż«┤╣╣▄Ż║
īŹ(sh©¬)¼F(xi©żn)čbąČ▒█╔ņ╚ļ▓█▄ć(ch©ź)ā╚(n©©i)
Ż¼õX║ŽĮ┤╣╣▄┐╦Ę■┴╦õō┘|(zh©¼)▓─┴Ž┼c╣▐▄ć(ch©ź)┼÷ū▓┐╔─▄«a(ch©Żn)╔·Ą─╬Ż║”
ĪŻ
9Ż«ŲĮ║ŌŽĄĮy(t©»ng)Ż║
ė├ęįŲĮ║Ō═Ō▒█╝░┤╣╣▄Ą─ųž┴┐Ż¼▀@śė╩╣Ą├▒█▓┘ū„ņ`╗Ņ
Īó▌pŪ╔
ĪŻŲĮ║ŌŽĄĮy(t©»ng)×ķÅŚ╗╔ĖūŻ¼Ėūā╚(n©©i)ÅŚ╗╔×ķē║┐sÅŚ╗╔
ĪŻ
10.šµ┐šČ╠┬Ęķy/┼┼ÜŌķyŻ║
šµ┐šČ╠┬Ęķy┤_▒ŻÜłėÓĮķ┘|(zh©¼)Å─·Q╣▄ųą┼┼┐š
Ż¼┼┼ÜŌķyė├ė┌ąČ▄ć(ch©ź)·Q╣▄┤╣╣▄ā╚(n©©i)ÜŌ¾w┼┼│÷ĪŻ
11. ┬Ģ╣Ōę║╬╗ł¾(b©żo)Š»Ż©┐╔▀xŻ®Ż║
ę║╬╗╠ĮŅ^░▓čbį┌┤╣╣▄Ņ^▓┐
Ż¼«ö(d©Īng)▓█▄ć(ch©ź)ā╚(n©©i)ę║¾wĮķ┘|(zh©¼)ĮėĮ³╣▐┐┌Ģr(sh©¬)╠ßąč▓┘ū„╚╦åTĻP(gu©Īn)ķ]ķyķT(m©”n)Ż¼┐╔┼c┐žųŲļŖę║ķy┬ō(li©ón)äė(d©░ng)
ĪŻ
Ż┐">ĖĪ▒P(p©ón)┬õĄūĄ─╬Ż║”ėą──ą®Ż┐
2019-12-18LNGŲ¹▄ć(ch©ź)čbąČ×ķ╩▓├┤▒žĒÜ╩╣ė├Ą═£ž·Q╣▄
2021-01-28Ż┐">ĖĪ▒P(p©ón)Ą─“×(y©żn)╩š╝╝ąg(sh©┤)ę¬Ū¾ėą──ą®
Ż┐
2021-03-09·Q╣▄«a(ch©Żn)ŲĘīŹ(sh©¬)ė├ųąĄ─ā×(y©Łu)ä▌(sh©¼)╩Ū╩▓├┤Ż┐
2021-01-26ŻĪ">ĻU╩÷·Q╣▄Ą─ŅA(y©┤)└õ▓Į¾EŻĪ
2021-02-19ŻĪ">·Q╣▄╩Ūę╗┐Ņ░▓╚½ąį║═ņ`╗ŅąįČ╝▒╚▌^Ė▀Ą─čbąČ╣▄▓─
ŻĪ
2021-04-07ĖĪ▒P(p©ón)╚ń║╬╠ßŪ░░▓╚½Ę└ĘČŻ┐
2021-01-16Ż┐">ĖĪ▒P(p©ón)Č╝ėą╩▓├┤▓─┘|(zh©¼)Ż┐
2021-02-26ŻĪ">šä?w©┤)ä·Q╣▄Ą─ŅA(y©┤)└õ▓Į¾E